Tacoma, WA
102723
UPS
102723
UPS
Concept
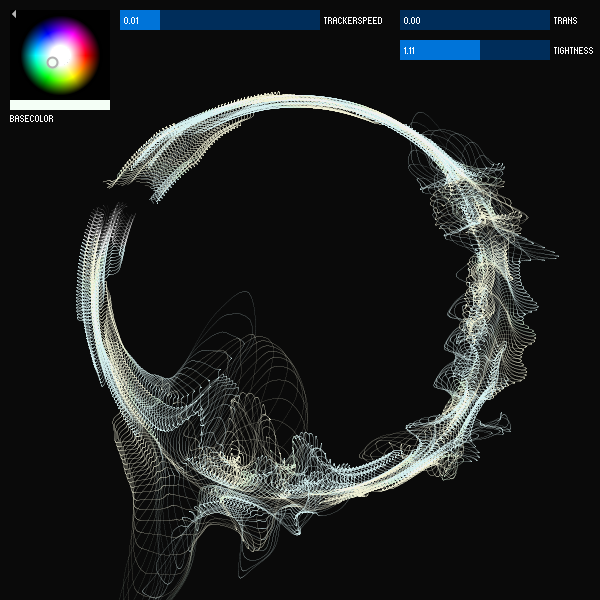
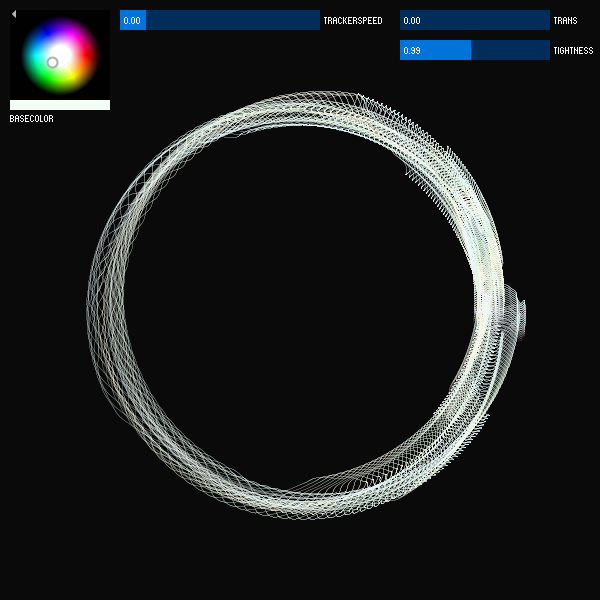
This project represents the urge to follow. 50 particles follow an invisible, ever-moving tracker in a circle. Each particles trudges the same path that the original made, a string of followers blindly walking the same path.
Process
This project utilizes classes, class methods, perlin noise, ArrayLists, and the ControlP5 Library to create these effects in a controllable manner. Each particle has individual movement based on a perlin noise seed at regular intervals. Beause of this, as they move, they end up with offset motion of the same type. A force method with the name “findTracker” draws each particle towards the invisible tracker by setting an acceleration proportional to the distance between the tracker and the particle.